¦
HOME ¦ Math
Software Downloads ¦ Numerical Methods
¦ Register Your Software ¦
Contact ¦ Search ¦
Credit ¦
|
|
|
Software: |
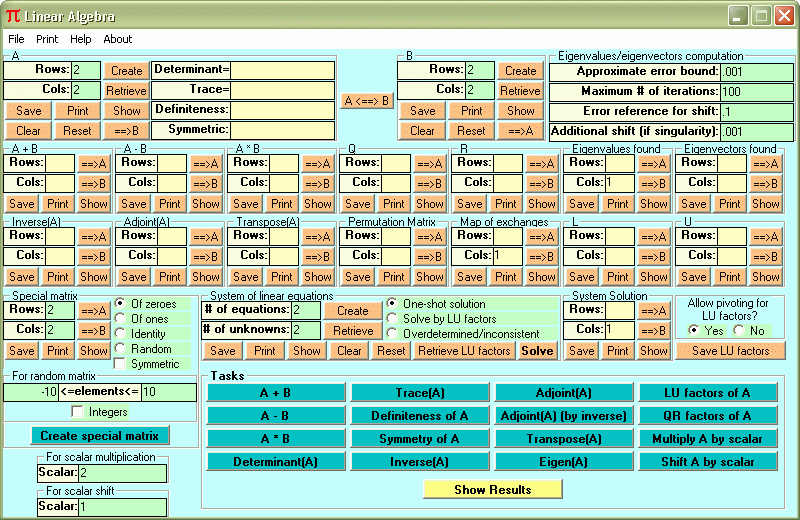
Click here to download LINEAR ALGEBRA Requirements: Windows 98 or later LINEAR ALGEBRA performs the following tasks: Add
– Finds the
sum of two matrices. Subtract
– Finds the
difference of two matrices. Multiply
– Finds the
product of two matrices. Determinant – Finds the determinant of a square matrix. Trace
– Finds the
trace of a square matrix. Inverse
– Finds the
inverse of a square matrix, if it exists. Inverse (Compact) – Finds the inverse of a square matrix, if it exists. This version is somewhat faster and more memory efficient since it does not do the actual row exchanges for the pivoting, neither does it actually attach an identity matrix to the original one. The inverse computed is placed in the same array as the original matrix. Adjoint
– Finds the
adjoint of a square matrix. Adjoint
by Inverse – Finds
the adjoint of a square, nonsingular matrix. LU
Factors -
Finds the LU factors of a matrix [A], that is, [L] and [U] such that [A]=[L][U],
with [L] being lower-triangular and [U] being upper-triangular. In reality, the
factorization can't always be done without exchanging the rows of [A] in some
manner. Because of this, a
permutation matrix [P] is generally involved.
This makes the actual factorization [A]=[P][L][U].
Also, since the program allows [A] to be rectangular, [U] in such case
would not be square so instead of upper-triangular we should more accurately
call it upper-trapezoidal. This program should be used before attempting to use
the program which solves simultaneous linear equations using LU factors. QR
Factors (Gram-Schmidt
orthogonalization) -
Factors a matrix [A] with
linearly independent columns into the product [A]=[Q][R], with [Q] having
orthonormal columns and [R] being upper-triangular and invertible.
Since [A] must have linearly independent columns, the number of columns
can't exceed the number of rows. Test
Definiteness -
Establishes the positive or negative definiteness, positive or negative
semidefiniteness, or indefiniteness of a symmetric matrix. Simultaneous
Linear Equations -
Solves
systems of linear equations using the method of Gaussian Elimination. Simultaneous
Linear Equations by LU Factors - solves systems of linear
equations using the LU factorization of the matrix of coefficients. This allows
quicker solution of many systems that share the same matrix of coefficients but
have different right-hand sides. Simultaneous
Linear Equations - Overdetermined or Inconsistent Systems -
Finds the least-squares
solution to a system of linear equations which may be inconsistent or
overdetermined with more equations than unknowns. Eigenvalues
and Eigenvectors -
Finds
the real eigenvalues and corresponding eigenvectors of a matrix.
If the matrix has a full set of eigenvectors (diagonalizable), then a
full set will be found even if some eigenvalues are repeated.
Eigenvalues are found using the Shifted QR method.
The corresponding eigenvectors are found using the Shifted Inverse Power
method. Matrices are first transformed into their upper-Hessenberg form. Transpose
- Finds the
transpose of a matrix. Multiply
by a Scalar – Performs
scalar multiplication. Shift
– Shifts
the diagonal elements of a matrix (useful
in the eigenvalue problem). Create
Matrix - Creates matrices of zeroes, ones,
identity matrices, symmetric, random or general matrices. |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Copyright © 2001-2010 Numerical Mathematics. All rights reserved.
|